


Суворов Дмитрий Александрович
ВВЕДЕНИЕ
В условиях нарастающих темпов строительства, повышения требований к качеству и снижению издержек современные строительные компании вынуждены искать новые технологические решения для оптимизации производственных процессов. Одним из наиболее перспективных направлений является автоматизация укладки стяжки пола, поскольку традиционные (ручные) методы сопряжены с высокой затратностью труда, длительными сроками выполнения работ и значительной зависимостью от человеческого фактора. Роботизированные технологии позволяют не только повысить скорость выполнения операций, но и обеспечить стабильное качество работ за счет автоматизированного контроля технологических параметров [3, 5].
Несмотря на потенциал и преимущества роботизированных систем в области укладки стяжки пола, их практическое применение сталкивается с рядом вызовов, препятствующих широкому распространению и эффективной интеграции данных технологий в строительный процесс.
Во-первых, высокий порог первоначальных инвестиций выражается в значительных капитальных расходах на приобретение роботизированного оборудования, проведение пусконаладочных работ и комплексного обучения персонала, что в ряде случаев превышает финансовые возможности малых и средних строительных организаций.
Во-вторых, отсутствие единых методик интеграции отражается на сложности при выборе оптимальных технических решений и адаптации автоматизированных комплексов под разнообразные условия эксплуатации, включая геометрические особенности объектов, климатические параметры и состав стяжки.
Третья проблема связана с техническими ограничениями современных роботизированных установок: недостаточной маневренностью в условиях ограниченного пространства, повышенной чувствительностью сенсорных систем к пылевым и вибрационным воздействиям, а также регулярной необходимостью проведения профилактического технического обслуживания и перенастройки систем управления.
Наконец, недостаточность объективных исходных данных для оценивания эффективности автоматизации, обусловленная разрозненными опытными образцами и различиями в критериях оценки производительности и качественных показателей, осложняет проведение репрезентативных сравнительных исследований и формирование универсальных экономических моделей окупаемости инвестиционных проектов.
В связи с вышеизложенным, целью исследования является проведение сравнительного анализа производительности ручного и роботизированного методов укладки стяжки пола с оценкой экономической целесообразности внедрения роботизированных систем.
Научная новизна состоит в интеграции расчетной модели, объединяющей данные о производительности работ, затратах на труд и технические характеристики роботизированных систем, что позволяет получить объективную оценку влияния автоматизации на экономическую эффективность строительного проекта.
Авторская гипотеза заключается в предположении, что внедрение роботизированных технологий в процесс укладки стяжки пола весьма снижает общие затраты (благодаря сокращению расходов на рабочую силу и сокращению количества дефектов), а также повышает качество выполненных работ, что в совокупности приводит к сокращению сроков окупаемости инвестиций в автоматизированное оборудование.
Методология основана на сравнительном анализе результатов других исследований в данной области.
МАТЕРИАЛЫ И МЕТОДЫ
В современных исследованиях по сравнению производительности ручного и роботизированного методов укладки стяжки пола можно выделить несколько тематических направлений, в рамках которых авторы рассматривают экономические, технологические, инженерно‑материальные и организационные аспекты процессов.
Вопросы экономической целесообразности внедрения роботизации в процессы укладки стяжки пола рассматриваются в работах Суворова Д.А. [1] и Будариной К.В. и Ломакиной В.Д. [15]. При этом Суворов анализирует прямые затраты на закупку, обслуживание и амортизацию робототехнических комплексов, сопоставляя их с экономией на трудозатратах и временем выполнения работ, и приходит к выводу о положительной инвестиционной отдаче при условии крупномасштабного применения [1]. В то же время Бударина и Ломакина проводят детальный экономический анализ, учитывая не только затраты и выгоды, но и факторы риска, связанные с внедрением новых технологий, и отмечают, что в ряде случаев без государственной поддержки или льготных программ роботизация может оказаться невыгодной [15].
На стыке робототехники и цифровых технологий ряд авторов подчеркивает роль информационных систем и интеллектуальных сенсоров. Фимушкин М.Э. и Терехова О.П. [2] рассматривают применение BIM-моделирования, систем мониторинга и анализа больших данных для оптимизации стройплощадок и управления роботизированными устройствами, отмечая ключевые преимущества в сокращении ошибок и логистических издержек. Mekruksavanich S., Jitpattanakul A. [10] исследуют методы глубокого обучения и носимые инерционные сенсоры для автоматического распознавания действий рабочих, предлагая системы, способные в реальном времени корректировать работу роботов в зависимости от активности персонала на площадке.
В прикладном ракурсе обобщающие обзоры и кейс‑стади по внедрению роботов в строительную отрасль представлены в работах Кладовой Т. О. [5] и Яковлева А. П. с Ивановым Д. В. [14], где авторы описывают основные типы применяемых устройств, их технические характеристики и области использования. Zhao S. et al. [9] фокусируются на автономных роботах для бетонных работ, включая подготовку основания и налив стяжки, выделяя ключевые технологические вызовы, такие как адаптация к изменяющимся условиям поверхности и обеспечение необходимой прочности покрытия. Аналогично Brosque C. et al. [8] сравнивают производительность роботов в строительной отрасли.
Чачко Б. Г. [3] подробно описывает инженерно‑конструкторские решения при проектировании промышленного робота для укладки напольной плитки, что близко по технологической базе к устройствам для стяжки пола. Автор анализирует мехатронные узлы, системы дозирования и управления, а также вопросы точности позиционирования инструмента, предлагая собственную концепцию модульной архитектуры робота.
Материальная составляющая процесса укладки стяжки исследуется Radulović R. et al. [7], которые уделяют особое внимание тонкозернистым цементным композитам и их свойствам при использовании в полах различной функциональной нагрузки. Макарова А.Ю. [13] анализирует конструктивные схемы полов в промышленных зданиях, включая требования к выравнивающим слоям и используемым смесям, обращая внимание на связь между толщиной стяжки и эксплуатационными характеристиками покрытия. В смежной области Tan L.B. et al. [12] рассматривают возможности использования специализированных составов для внутренних промышленных полов.
Наконец, традиционные методы и технологические приемы отделочных работ описаны в работах Бидова Т.Х. и Желтой А.О. [4], где рассматриваются ручные решения при укладке стяжки на объектах жилой застройки Москвы, включая эргономику рабочих операций и мероприятия по обеспечению качества поверхности, а также в монографии Фирсенко Д. [11], где даются базовые сведения по конструированию и строительству многоквартирных домов, в том числе требования к устройству полов и технологиям их устройства.
Проведенный анализ демонстрирует следующие противоречия в литературе: экономические исследования показывают как высокую инвестиционную привлекательность роботизации при масштабном применении, так и риски низкой окупаемости без господдержки; оптимистичные оценки экономии времени и ресурсов в обзорах контрастируют с реалиями адаптации к сложным условиям стройплощадки и необходимостью дорогостоящей наладки. Среди недостаточно освещенных вопросов выявлены: стандартизация методик сравнения производительности ручного и автоматизированного процессов именно в укладке стяжки пола; комплексная оценка влияния качества материалов на эффективность роботизированных систем; вопросы безопасности и эргономики при работе совместно с людьми; а также интеграция роботизированных агрегатов в общую систему цифрового управления строительством.
РЕЗУЛЬТАТЫ
Укладка стяжки пола является основным этапом в строительстве, обеспечивающим создание ровной и прочной основы для дальнейшей отделки. Традиционные методы предполагают ручное или механизированное нанесение раствора, состоящего из цемента, песка и воды, с соблюдением определенных пропорций. При классическом подходе, особенно для полусухой стяжки, широко используется значительное уменьшение количества воды в смеси ― обычно от 0,33 до 0,4 части воды на единицу цементно-песчаной смеси, что весьма отличается от стандартного соотношения 1:1. Такое снижение водоцементного отношения способствует ускоренному отвердеванию и улучшению прочностных характеристик, а также минимизирует риск образования усадочных трещин и протечек [13, 15].
При традиционной (ручной) укладке основное внимание уделяется качественной подготовке основания, равномерному распределению смеси и формированию маяков для последующей корректировки толщины слоя. Однако существенным недостатком данного метода является высокая зависимость от квалификации рабочих, длительность технологических пауз и необходимость постоянного контроля параметров работы, что приводит к значительным трудозатратам и снижению общей производительности.
Современные достижения в области автоматизации позволяют изменить традиционный (ручной) подход к укладке стяжки. Роботизированные системы, например, платформа STIZO Robot Screed, интегрируют современные технологии лазерного контроля и автоматического регулирования параметров нанесения раствора. Ключевым преимуществом таких систем является их способность непрерывно контролировать геометрию укладки, что позволяет достигать высокой точности распределения материала и равномерной толщины слоя без участия большого числа операторов [12, 14].
В роботизированных технологиях используется система лазерной нивелировки, которая позволяет автоматически формировать маяки и корректировать укладку в реальном времени. Это не только сокращает технологические паузы, но и минимизирует влияние человеческого фактора, обеспечивая стабильное качество работ. Дополнительно, роботизированные системы способствуют ускорению процесса ― примером тому является возможность укладывать до 480 м² стяжки за смену при участии только 2–3 операторов, что кардинально отличается от традиционного (ручного) метода (150 м²/смена при участии 5 человек) [3, 5].
Для наглядного представления различий между традиционными и роботизированными методами укладки стяжки пола приведена табл. 1, в которой сопоставлены ключевые технологические и экономические параметры, используемые в расчетной модели.
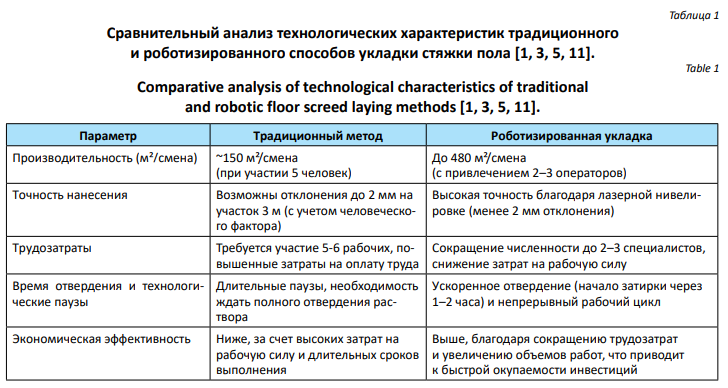
Рассмотрение теоретических основ традиционных (ручных) и роботизированных методов укладки стяжки пола позволяет выявить существенные различия в подходах к реализации строительного процесса. В то время как традиционный метод обеспечивает достаточное качество работ при условии высокой квалификации сотрудников, роботизированные технологии демонстрируют значительный потенциал по оптимизации производственных процессов за счет автоматизации контроля параметров укладки. Система лазерной нивелировки и автоматизированное формирование маяков позволяют снизить технологические паузы и сократить возможность ошибок, что положительно сказывается на конечном качестве выполненных работ.
Современные исследования также акцентируют внимание на том, что применение автоматизированных систем способствует увеличению производительности и снижению экономических затрат при масштабных строительных проектах. Это особенно актуально в условиях высокой конкуренции и стремления строительных компаний к оптимизации затрат за счет внедрения инновационных технологий.
Таким образом, теоретическое обоснование и сравнительный анализ представленных методов демонстрируют, что роботизированная укладка стяжки пола обладает явными преимуществами в виде повышения производительности, уменьшения влияния человеческого фактора и улучшения качества работ, что в совокупности приводит к повышению экономической эффективности всего строительного процесса.
ОБСУЖДЕНИЯ
Для оценки эффективности внедрения роботизированной системы в процессы укладки стяжки пола было разработано сравнительное моделирование двух сценариев. Для сравнения рассмотрим годовую производительность при условии 300 рабочих дней.
1. Без робота: Ежедневно 150 м² ⇒ 150 × 300 = 45 000 м² в год;
● Затраты на оплату труда: 5 человек по 220 руб./м² ⇒ 33 000 руб. в день ⇒ 9 900 000 руб./год.
● Материалы: 229 руб./м² ⇒ 229 × 45 000 = 10 305 000 руб./год.
● Итого затраты: 9 900 000 + 10 305 000 = 20 205 000 руб./год.
● Доход при реализации услуги: 623 руб./м² ⇒ 623 × 45 000 = 28 035 000 руб./год.
● Чистая прибыль: 28 035 000 – 20 205 000 = 7 830 000 руб./год.
2. С роботом (STIZO Robot Screed):
● Ежедневно 480 м² ⇒ 480 × 300 = 144 000 м² в год;
● Оплата труда двух операторов: исходя из средней ставки 3 500 руб./день на одного (7 000 руб./день на двоих) ⇒ 7 000 × 300 = 2 100 000 руб./год.
● Материалы: 229 руб./м² ⇒ 229 × 144 000 = 32 976 000 руб./год.
● Стоимость самого робота (единовременная инвестиция): 650 000 руб.
● Ежегодное техобслуживание: ~178 750 руб.
● Обучение операторов (единоразово): 116 000 руб.
● Расчет общей суммы расходов за год 1:
● Производственные затраты: 2 100 000 (труд) + 32 976 000 (материалы) = 35 076 000 руб.;
● Обслуживание робота: 178 750 руб.;
● Разовый ввод в эксплуатацию: 650 000 (покупка) + 116 000 (обучение) = 766 000 руб.
● Следовательно, совокупные затраты в первый год составят: 35 076 000 + 178 750 + 766 000 = 36 020 750 руб.
● Доход при оказании услуги: 623 руб./м² ⇒ 623 × 144 000 = 89 712 000 руб./год.
● Чистая прибыль за вычетом всех затрат в год 1:89 712 000 – 36 020 750 = 53 691 250 руб.
Для наглядного представления показателей в табл. 1 обобщены основные финансовые параметры обоих сценариев на промежутке в 1 год, учитывая разовые и годовые траты на робот.
Для наглядности приведем сравнительный анализ основных экономико-технических показателей в табл. 2.
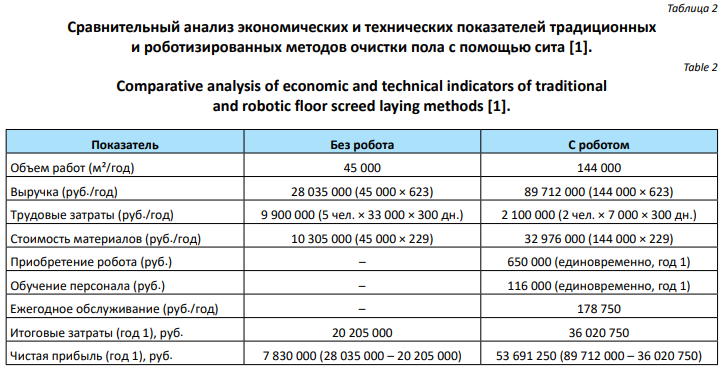
Примечание: Расчеты выполнены при условии 300 рабочих дней в году, расходе материалов 229 руб./м² и цене реализации 623 руб./м².
Как видно из сравнительных данных, роботизированная схема, несмотря на высокие стартовые издержки, обладает значительно большей производительностью и дает более высокий годовой объем работ (144 000 м² против 45 000 м²). Следовательно, совокупная выручка и чистая прибыль оказываются существенно выше. Даже если учесть, что по мере роста объемов могут потребоваться дополнительные расходы (расширение штата операторов, логистические и складские затраты), экономический эффект от повышения скорости и снижения издержек на труд очевиден.
Разница в чистой прибыли между двумя сценариями в год 1 составляет порядка 53,7 млн руб. (робот) – 7,8 млн руб. (без робота) = 45,9 млн руб. При этом объем разовых инвестиций в робот + обучение = 766 000 руб., а обслуживание в первый год – 178 750 руб. Нетрудно заметить, что даже при учете роста расходов на материалы (в 229 руб./м² уже заложены базовые затраты), общая прибыль фирмы при роботизированной укладке возрастает кратно.
Статический период окупаемости (Payback period) можно определить как отношение суммарных дополнительных инвестиций к приросту ежегодной прибыли. В простейшем виде:

где ΔI ― разовые и годовые дополнительные вложения (без учета расходов на материалы, так как они пропорциональны объему работ), ΔΠ ― прирост чистой прибыли по сравнению со сценарием без робота.
Таким образом, в упрощенной модели при полном использовании потенциальной производительности робота его окупаемость в год 1 наступает в течение первых 1–2 недель активных работ. Очевидно, что в реальных условиях эти сроки могут сместиться из-за неполной загрузки или неожиданных простоев, но даже при 50% загрузке роботизированная укладка остается высокорентабельной.
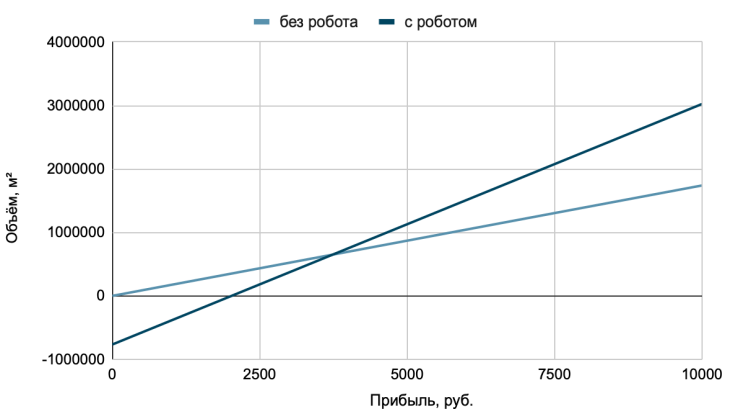
Рис. Кумулятивная прибыль при разном объеме укладки [1]. Fig.1. Cumulative profit for different stacking volumes [1]
Из рисунка видно, что при объеме 2 000 м² робот все еще в минусе (–8 000 руб.), а где-то в диапазоне 3 700–3 800 м² выгода от роботизации превышает итоговую прибыль при использовании только бригады.
Кроме того, сравнительный анализ пилотных испытаний продемонстрировал снижение трудозатрат: необходимость участия в проекте сокращается с пяти-шести квалифицированных рабочих до двух-трех операторов системы, что приводит к снижению расходов на оплату труда (с 9 900 000 до 2 100 000 рублей в год) [3, 5]. Экономическая эффективность робота также выражается в увеличении чистой прибыли – расчетные данные пилотного проекта указывают на рост чистой прибыли с 7,83 млн до 53,69 млн рублей в год, несмотря на необходимость разовых инвестиций (оборудование, обучение) и ежегодного обслуживания.
Внедрение роботизированных систем требует определенной организационной и технологической подготовки. На этапе интеграции системы необходимо обеспечить корректную подготовку основания – тщательное удаление мусора, выравнивание и обеспечение оптимального сцепления слоя, а также предусмотреть установку дополнительных коммуникационных систем (например, для интеграции инженерных решений, таких как теплые полы и звукоизоляция). Важнейшим условием является обучение персонала, которое позволяет операторам эффективно управлять роботизированной платформой, что уменьшает риск ошибок в эксплуатации и обеспечивает высокую точность выполнения работ. Организационно-технологический аспект также включает логистику ― обеспечение перемещения и хранения робота, планирование технического обслуживания и оперативное реагирование на возможные сбои в работе системы [3].
Перспективы внедрения роботизированных систем в процессы укладки стяжки пола оцениваются как весьма значимые, особенно в условиях увеличения масштабов строительных проектов и стремления оптимизировать затраты на труд. Современные исследования указывают, что роботизация позволяет не только повысить производительность, но и снизить риски, связанные с ошибками укладки, что приводит к улучшению качества конечного продукта [7]. Кроме того, интеграция роботизированных решений в концепцию «Индустрии 4.0», с использованием Интернета вещей и систем анализа данных, предоставляет дополнительные возможности для оптимизации управления строительными процессами [6, 8].
Для успешной практической апробации и масштабного внедрения рекомендуется:
● Провести пилотные проекты с последующим сравнительным анализом результатов для различных типов объектов (крупные объекты против небольших площадей, где роботизация может быть менее эффективной) [5].
● Обеспечить комплексное обучение специалистов для гарантии корректного управления роботизированными системами.
● Разработать адаптивные алгоритмы управления, способные учитывать особенности каждого объекта и оперативно корректировать параметры укладки в зависимости от состояния основания и условий окружающей среды.
● Внедрить системы дистанционного мониторинга и диагностики состояния робота для снижения простоев и повышения надежности эксплуатации [9, 10].
Для наглядного сравнения практической апробации и перспектив внедрения роботизированного метода по основным технологическим и организационным параметрам приведена табл. 3.
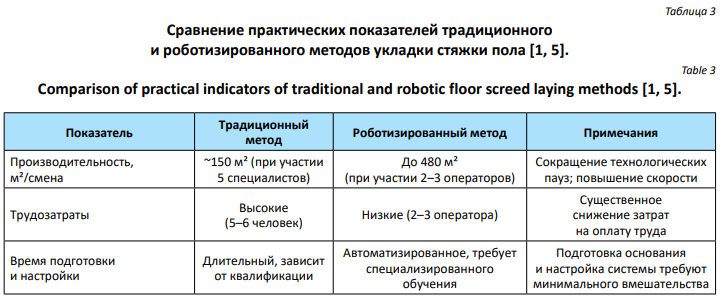

Практическая апробация роботизированных систем укладки стяжки пола на пилотных объектах демонстрирует большой потенциал технологии для повышения производительности, снижения трудозатрат и улучшения качества работ. Организационно-технологические мероприятия, включая обучение персонала, настройку оборудования и интеграцию систем мониторинга, являются ключевыми факторами успешного внедрения. Перспективы дальнейшего развития данной технологии поддерживаются не только отечественными исследованиями, но и международными исследованиями в области автоматизации строительных процессов. Рекомендации, вытекающие из апробационных исследований, позволяют уверенно прогнозировать дальнейшую коммерциализацию и масштабирование роботизированных систем в строительной отрасли.
ЗАКЛЮЧЕНИЕ
Сравнительный экономико-технический анализ показал, что роботизированный метод обеспечивает увеличение производительности, снижение затрат на оплату труда и повышение чистой прибыли даже при учете дополнительных инвестиций в оборудование и обучение персонала. Пилотные исследования подтверждают, что внедрение роботизированных систем позволяет добиться сокращения сроков окупаемости инвестиций, а также улучшить качество укладки за счет минимизации ошибок, связанных с человеческим фактором.
Организационно-технологический анализ выявил ключевые требования к успешной интеграции роботов в строительные процессы, включая подготовку основания, логистику, техническое обслуживание и обучение специалистов. Перспективы дальнейшего развития данной технологии особенно актуальны в условиях масштабных строительных проектов и перехода к цифровизации отрасли в рамках концепции «Индустрия 4.0». В итоге, результаты исследования свидетельствуют о высоком потенциале роботизированных методов для оптимизации затрат и повышения конкурентоспособности строительных компаний, что открывает новые горизонты в сфере автоматизации строительных процессов и требует дальнейшего изучения и практической апробации инновационных решений.