

АКТУАЛЬНОСТЬ
Большую часть потребляемого сегодня продовольствия обеспечивает растениеводство. Оно же одна из самых крупных и трудоемких отраслей [15]. Отрасль сельского хозяйства крайне неэффективна в плане выполнения операций по уходу за растениями. Большинство выполняемых работ, таких как прополка, прореживание, уборка урожая некоторых полевых культур, имеют низкую степень механизации или вовсе выполняются вручную. Ручной труд малоэффективен и дорог. Современные промышленные предприятия пару десятилетий назад приступили на практике к приемам замены ручного труда машинным путем комплексной автоматизации процессов с применением систем роботизации. На сегодняшний день промышленные роботы широко используются на предприятиях, выполняют ответственную работу с постоянным уровнем качества и высокой скоростью. Однако процессы комплексной механизации и автоматизации мало используются в сельском хозяйстве, даже с учетом того, что в этой отрасли значительная часть вспомогательных операций, как правило, монотонна и утомительна, связана с прополкой, периодичным мониторингом, механическим удалением сорняков, загрузкой и разгрузкой, перемещением и т. п., практически не поддается механизации традиционными средствами, продолжает выполняться вручную, тормозит дальнейшее совершенствование технологий [10, 17].
Наиболее перспективным направлением внедрения новых технологий в систему управления техникой считается оснащение машин искусственным интеллектом [3, 12]. Конечной задачей инновационных разработок в области сельхозмашиностроения является создание нового типа механизированных устройств с автономной системой управления, без участия человека. По прогнозам международной компании Tractica, объем рынка агророботов достигнет 74,1 млрд долл. к 2024 г. Производство сельскохозяйственных роботов возрастет за это время почти в 19 раз — до 594 тыс. единиц техники. В 2018 г. этот показатель составлял 45 тыс. роботов [2, 16].
Наибольшее количество роботов задействовано при производстве молока крупного рогатого скота — 55 %, на втором месте находятся роботы для других животноводческих ферм — 22, далее следуют роботы по уходу за посевами — 11 %, доля роботов для почвообработки составляет 7 %, и только 5 % приходится на роботов, задействованных в уходе за растениями [13].
С проблемой стареющего населения и нехватки рабочей силы в сельском хозяйстве сталкивается большинство развитых стран. При этом спрос на сельхозпродукцию неуклонно растет, что создает угрозу для продовольственной безопасности стран и мотивирует фермеров активно внедрять автономные технологии. Беспилотные тракторы и техника уже успешно справляются со многими трудоемкими задачами.
Умные тракторы умеют совершать необходимые маневры, выполняют задания с минимальными погрешностями, определяют границы поля. Причем роботы могут работать круглосуточно, а управлять ими можно с помощью планшета.
МАТЕРИАЛЫ И МЕТОДИКА
Любой полевой робот может быть представлен в виде совокупности трех больших систем — транспортной, специальной и системы управления.
Транспортное средство состоит из ходовой части, корпуса, энергетической установки [4]. Как правило, внутри корпуса устанавливается система управления. В зависимости от внешней среды эксплуатации подбирается ходовая часть транспортного средства. Самые распространенные типы движителей — это гусеничный и колесный, также различают роторный, колесно-гусеничный, полугусеничный, шагающий и колесно-шагающий [5–9].
Специальные системы служат для непосредственного выполнения поставленных задач. Состоят из необходимого набора технологического оборудования, состав которого определяется видом решаемой задачи и назначением.
Система управления обеспечивает управление движением и работой технологического оборудования, а также адаптивное управление ходовой частью и энергетической установкой с учетом взаимодействия транспортной системы с окружающей средой. Система управления движением должна также обеспечивать планирование движения в недетерминированных условиях на основе картографической базы с учетом непрерывно поступающей информации в систему управления от технических органов чувств и навигационной системы [14].
Сложность системы управления определяется сложностью решаемой задачи, степенью неопределенности внешней среды и требуемой степенью автономности робота [11]. Именно развитие систем управления определяет развитие робототехнических комплексов. В общем случае система управления содержит три уровня управления: верхний (стратегический); средний (тактический) и нижний (исполнительный), которые имеют встроенные механизмы адаптации, работающие на основе оценки качества реализации планов различного уровня в реальном физическом мире. Организация взаимодействия уровней управления должна позволять принимать решение на том уровне, который в данный момент обладает наиболее достоверной информацией без передачи управления на более высокий уровень.
В настоящее время очень широкое распространение в робототехнике получили именно лазерные сканеры. Огромным преимуществом данного прибора является возможность сканирования в плоскости с углом обзора до 360°. Это позволяет системе с лазерным сканером решать задачи как навигации и избегания столкновений, так и построения трехмерных карт в реальном масштабе времени.
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ
Одна из возможных схем конструкций автономного роботизированного модуля показана на рисунке 1. С помощью трех лазерных сканеров осуществляются задачи локальной и персональной навигации, формирования трехмерной карты местности и избегания столкновений. Кроме этого, глобальная навигация осуществляется с помощью приемника ГЛОНАСС или GPS, гироскоп контролирует максимально допустимый наклон транспортного средства, лазерный радар позволяет отслеживать объекты, находящиеся на значительном расстоянии. Использование систем технического зрения позволяет значительно расширить задачи, стоящие перед таким устройством [2].
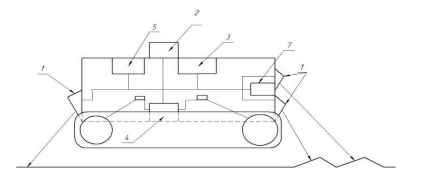
Рис. 1. Схематичная конструкция роботизированного трактора: 1 — лазерный сканер; 2 — радар; 3 — гироскоп; 4 — бортовой компьютер; 5 — навигационная система ГЛОНАСС; 6 — система управления движением; 7 — видеокамера
Рассмотрим новейшие достижения в мире за последние 7 лет в области сельскохозяйственного машиностроения. Обзор конструкций и примеры использования сельскохозяйственных роботов за рубежом начнем с компаний Clearpath Robotics, «Китченер» (Онтарио, Канада) (рис. 2).

Рис. 2. Grizzly RUV — роботизированный внедорожник без кабины
Область применения: реализован научно-исследовательским учреждениям с целью развития приложений для сельского хозяйства.
Функция: сбор урожая, косьба, вывоз, исследование.
Тестирование:
• проводится тестирование на спарже с использованием лазерного сканера для выявления стеблей и их обрезания внутри почвы;
• вывоз навоза с птицеферм во время чистки амбаров;
• определение участков на поле, где коровы совершают мочеиспускание с целью последующей обработки почвы, чтобы трава продолжала расти;
• косьба на участке между рядами фруктовых деревьев в садах;
• перевозка вагонов с сеном/соломой в сарай и обратно;
• перевозка химических наполнителей к местам распыления;
• вывоз навоза.
Компания: Amazone-Werke Gmbh, (Хасберген, Германия) представила свой робот (рис. 3) [3].

Рис. 3. Полевой робот Amazone-Bosch BoniRob
Область применения: работа на экспериментальных участках кукурузы и пшеницы в Германии. Функция: автономные полевые роботы, способные перемещаться в любом направлении, предназначены для работы в «командах». Тестирование: универсальный легкий робот для прополки, удобрения.
Концепт трактора-беспилотника от компании Case IH был представлен в США на выставке Farm Progress (рис. 4).

Рис. 4. Трактор-беспилотник от компании Case IH
Он сразу же привлек к себе внимание благодаря своей необычной форме — у техники полностью отсутствует традиционная кабина. То есть человеку не оставили ни малейшего шанса и дали четко понять, что время трактористов и комбайнеров подходит к концу. Разработчики компании утверждают, что идею создания трактора без кабины подали им сами фермеры — во время посадки и сбора урожая им остро не хватает квалифицированных специалистов.
Трактор-робот создавался в сотрудничестве с CNH Industrial на базе сельхозтехники «Магнум» Case IH. Однако внешность и возможности беспилотной машины кардинально отличаются от предшественников.
Система автопилота принимает во внимание габариты трактора и присоединенного прицепа. Обязательно учитывает рельеф местности, настоящие погодные условия и метеопрогнозы. Благодаря лидару, камерам и сенсорам умный трактор распознает стационарные и движущиеся препятствия.
Управлять техникой можно посредством компьютера или мобильного гаджета.
Проект «АгроБот» от российской компании «Аврора Роботикс» — это система автопилотирования сельскохозяйственной техники (рис. 5). Предложенное решение позволяет автоматизировать большую часть полевых работ, сделать их быстрее и точнее, исключив человеческий фактор. Система управления является универсальной и может быть установлена на любую спецтехнику или трактор. Электроника, антенны, датчики и вспомогательное оборудование «АгроБота» расположены на специальном корпусе, который устанавливается вместо привычной кабины на новую или уже существующую основу [1].

Рис. 5. Проект «АгроБот» от российской компании «Аврора Роботикс»
ВЫВОДЫ И РЕКОМЕНДАЦИИ
В связи с изложенным выше необходимо провести исследования в области механики сельскохозяйственных роботов: разработать методики проектирования кинематических схем, комплексного расчета ходовой части мобильной транспортной платформы; провести техникоэкономическую оценку использования мобильной энергетической платформы.