

Одним из способов повышения энергоэффективности оборудования ТЭК, выполняющего сложные технологические операции, является применение регулируемых электроприводов [1–3]. Электроприводы на базе двухфазного асинхронного двигателя находят применение на сверлильных и намоточных станках, широко используются в бытовой технике, где также применяются и другие системы электропривода [4–6].
Перспективной областью применения двухфазных частотно-регулируемых асинхронных электроприводов являются промышленные и мобильные роботы, а также мехатронные системы с питанием от цифровых подстанций (рис. 1) [7–10]. Следует отметить, что большое количество применяемых в настоящее время электроприводов переменного тока средней и малой мощности все еще являются нерегулируемыми, и они выполняются в основном на базе однофазных конденсаторных двигателей. На механизмах, где регулирование скорости является неотъемлемой задачей, часто применяются двигатели постоянного тока, имеющие ненадежный щеточно-коллекторный узел, требующий оперативного мониторинга [11–13].

Рис. 1. Распределительное устройство на базе низковольтной комплектной установки «Каскад»
Переход к использованию частотно-регулируемых электроприводов на базе двухфазного асинхронного двигателя требует разработки специализированных преобразователей частоты (ПЧ) и соответствующих систем автоматического управления [14–16]. Известны схемы силовой части тиристорных преобразователей, в том числе непосредственных преобразователей частоты, а также преобразователей частоты со звеном постоянного тока и транзисторным инвертором напряжения [17–20]. В этом случае возможны три варианта конструкции инвертора: с двумя, тремя и четырьмя стойками. Перспективным для управления двухфазным двигателем является применение широко используемого в трехфазных электроприводах трехстоечного инвертора, выпускаемого промышленностью в виде скомпонованного модуля, который при его работе в двухфазном электроприводе должен иметь специализированный алгоритм управления [21–23]. Именно создание эффективного алгоритма управления преобразователем является важнейшей задачей при разработке частотно-регулируемого электропривода на базе двухфазного двигателя с векторным управлением. При построении системы векторного управления двухфазным электроприводом не требуются координатные преобразования, выполняемые в системах векторного управления трехфазным асинхронным двигателем, что упрощает алгоритм управления [24–26].
ЭТАПЫ РАЗВИТИЯ ДВУХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ
В настоящее время уже не вызывает сомнения тенденция замены нерегулируемых электрических приводов регулируемыми, охватывающая не только крупные промышленные механизмы, но и отдельные узлы устройств малой мощности, и даже бытовые электроприборы. Этому способствуют два основных условия современности: необходимость экономии энергоресурсов за счет снижения их потребления путем повышения энергоэффективности электроприемников и стремительное развитие рынка изделий на основе полупроводниковых материалов и микропроцессорной техники. Даже небольшое снижение темпов производства полупроводников и микроэлектронных компонентов значительно повышает их цену, что лишь подчеркивает всеобщий спрос на них, обусловленный необходимостью их применения во всех новых сферах промышленности и домашнего хозяйства [27–29]. Вместе с тем спрос на полупроводники и микропроцессоры является отчасти лишь отражением спроса на регулирование потребляемой мощности электрических устройств с минимальными потерями.
Почти во всех крупных промышленных установках уже завершена замена на регулируемые электроприводы, во многих случаях ведется их постоянная модернизация с целью применения наиболее современных САУ, все более снижающих возникающие потери. Однако еще существуют отрасли, где применение регулируемых приводов охватило лишь недостаточно малую часть устройств, требующих подобной замены. Это область тяговых механизмов, где еще господствуют двигатели постоянного тока (ДПТ), а также сфера маломощных промышленных и бытовых электроприборов, где применяются нерегулируемые однофазные двигатели.
Строго говоря, однофазные асинхронные двигатели (в иностранной литературе single-phase induction motors — SPIM) не являются однофазными в чистом виде, а имеют вторую обмотку статора, которая повернута относительно первой на 90 град. и в которой фаза питающего напряжения смещена относительно первой на 90 электрических градусов. Ротор у них, как правило, короткозамкнутый. Если смещение фазы второй обмотки обеспечивается подключением к первой через фазосмещающий конденсатор, то такой двигатель называют конденсаторным. Без второй обмотки в двигателе не возникает вращающее поле, создающее пусковой момент, следовательно, пуск машины не будет возможен. Однако после запуска и выхода на скорость, близкую к номинальной, вторую обмотку однофазного двигателя можно отключить для снижения потребляемой мощности. В этом случае говорят о пусковой обмотке (start winding) и пусковом конденсаторе. Но в других случаях, наоборот, важно поддерживать высокую мощность двигателя, для чего вторая обмотка не отключается, а остается постоянно включенной через рабочий конденсатор. В этом случае первую обмотку называют основной (main winding), вторую — вспомогательной (auxiliary winding), а для обеспечения большего пускового момента в момент пуска параллельно рабочему конденсатору подключается пусковой. Такие двигатели остаются нерегулируемыми, для обеспечения рабочих процессов они могут работать в повторно-кратковременных режимах, а в отдельных случаях они имеют различные релейные схемы, обеспечивающие их реверс.
Если же вспомогательная обмотка подключается к своему отдельному источнику питания, а не через источник питания основной обмотки, то такой двигатель называют двухфазным. Таким образом, если обеспечить регулирование однофазного двигателя путем раздельного подключения его обмоток через ПЧ, то необходимо говорить уже о частотном асинхронном электроприводе на базе двухфазного двигателя (в иностранной литературе two-phase induction motor — TPIM).
Заметим, что если двухфазный асинхронный двигатель будет иметь столько же пазов статора для распределенной обмотки, сколько и аналогичный по мощности трехфазный двигатель, то на одну его фазу будет приходиться в полтора раза больше пазов. Число пазов одной фазы напрямую связано с числом пар полюсов. Таким образом, получается, что при сохранении полезной мощности у двухфазного асинхронного двигателя скорость вращения поля меньше, а пусковой момент больше, чем у аналогичного трехфазного двигателя.
Первый двухфазный асинхронный двигатель (ДАД) был изобретен на год раньше трехфазного. В 1888 году была опубликована статья Г. Феррариса с предположением о небольшом КПД асинхронных машин на примере двухфазного двигателя, а Н. Тесла получил патент (рис. 2) на изобретение многофазного, в первую очередь, двухфазного двигателя. Год спустя ДоливоДобровольский изобрел трехфазный асинхронный двигатель (АД), имевший неоспоримые конструктивные и функциональные преимущества перед ДАД, что не дало им широкого распространения. Преимущества заключались в применении распределенных обмоток статора и беличьего колеса в отличие от сосредоточенных обмоток двухфазного двигателя Н. Теслы, что улучшало пусковые характеристики и устраняло зависимость пускового момента от начального положения ротора. Кроме того, ДАД требовали четырехпроводные электрические сети. И хотя в последующем двухфазные двигатели стали выпускаться с той же конструкцией, что и трехфазные, более-менее широкое распространение они получили лишь в США и Японии.
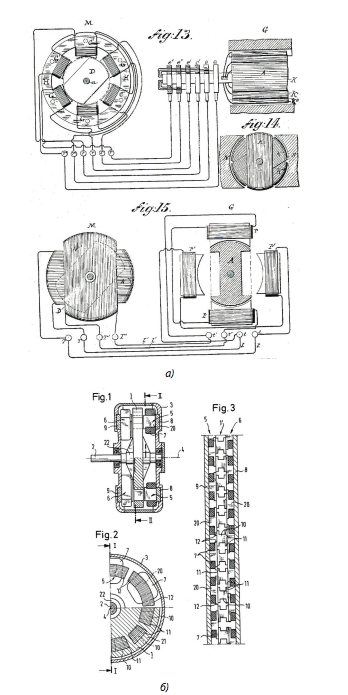
Рис. 2. Эскизы к патентам Н. Тесла US381968 США № 252132 (а) и патенту US4095150 США, № 704466 (б)
Маломощные ДАД подходили для бытовых однофазных сетей, но в мощных устройствах, требующих подключения к трехфазной сети, были необходимы дополнительные преобразователи числа фаз. Для получения двухфазного напряжения от трехфазного источника была разработана схема Скотта подключения однофазных трансформаторов. В Японии она применяется для питания контактной сети железных дорог. В США двухфазные двигатели и двухфазные электрические сети производились компанией Westinghouse Electric, но уже в начале XX века оказались вытеснены трехфазными. Небольшие ДАД массово использовались в сервомеханизмах до середины XX века, но затем были заменены на легкие в управлении ДПТ.
К новым разработкам ДАД и их САУ не приступали до конца XX века. Во многом это связано с тем, что для питания двухфазных электроприводов от трехфазной сети и их регулирования требовалась довольно сложная и быстродействующая САУ. При этом до резкого скачка в производстве ПЧ в регулируемых электроприводах в основном использовались ДПТ, а в нерегулируемых — АД с короткозамкнутым ротором. Подкупала простота САУ ДПТ, заменять их на АД с питанием от ПЧ начали всего пару десятилетий назад, а на многих агрегатах, требующих широкого регулирования скорости, они используются до сих пор. Потому идея о внедрении ДАД долгое время выглядела нецелесообразной, и исследования САУ для них не проводились.
Тем не менее, периодически выходили патенты, в которых описывались принципиально новые структуры двухфазного двигателя. Примером может служить патент США № 704466, вышедший в 1978 году. Ротор представляет собой плоский диск, по обеим сторонам которого расположены полюса статора с обмотками. С каждой стороны расположено 12 полюсов статора, принадлежащих двум фазам. На обмотки подается импульсное постоянное напряжение с переменным знаком, напряжения двух фаз смещены на угол, равный четверти одного периода серии из двух импульсов. Каждая фаза регулируется отдельным импульсным генератором, управляемым реле времени, питанием всей системы служит источник постоянного тока. Таким образом, уже в этом патенте было предугадано последующее управление приводом с помощью широтно-импульсной модуляции (ШИМ) — последовательности импульсов постоянного напряжения, которая за счет изменения зазоров между ними формирует синусоидальный ток статора.
Довольно активное применение в шаговых и сервоприводах двухфазных двигателей с постоянными магнитами в роторе в начале 1990-х гг. побудило к публикации патента, направленного на создание бездатчикового управления скоростью вентильных двигателей постоянного тока. Данный способ управления основан на расчете скорости через противо-ЭДС, которая в свою очередь рассчитывается через токи и напряжения обмоток статора.
Примерно в то же время развитие компьютерной техники определило необходимость массового выпуска маломощных вентиляторов систем охлаждения, для облегчения конструкции которых в двигателе используется полый ротор. Для данных микромашин наиболее удобным оказалось применение ДАД, где вместо короткозамкнутого ротора применяется алюминиевый цилиндр, вращающийся в воздушном зазоре между внутренним и внешним статорами. Электродвигатели с полым ротором и крайне малым моментом инерции рассчитаны на небольшие мощности и применяются для автоматического регулирования в компенсационных и мостовых схемах. Одна из обмоток вместе с конденсатором подключается к сети, а на вторую обмотку подается управляющее напряжение.
Больших успехов в теоретическом описании ДАД добился коллектив румынских, финских и британских ученых во главе с М. Попеску. Ими были выведены математические уравнения, описывающие симметричные и несимметричные однофазные и двухфазные двигатели в различных режимах работы, подготовлено математическое описание векторных САУ ДАД относительно нескольких систем отсчета, проведены серии математического моделирования нескольких двухфазных электроприводов, определено влияние отклонения угла между двумя фазами от 90 град. Заложенный математический аппарат был использован практически во всех последующих работах, посвященных ДАД, и применяется сегодня.
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ, АДАПТИРОВАННЫЕ ДЛЯ РАБОТЫ С ДАД
После того, как стало возможным использовать системы микропроцессорного управления, в 1980-х гг. были разработаны новые САУ ДАД с помощью автономного инвертора ПЧ. Частотно-регулируемый привод позволяет работать в двух режимах: регулируемом — с питанием от инвертора, и нерегулируемом — с питанием от сети однофазного тока и подключением второй обмотки через конденсатор (рис. 3). ПЧ подключается к однофазной сети и состоит из нерегулируемого мостового диодного выпрямителя, конденсаторного фильтра и регулируемого трехфазного инвертора напряжения, аналогичного инверторам трехфазных приводов.
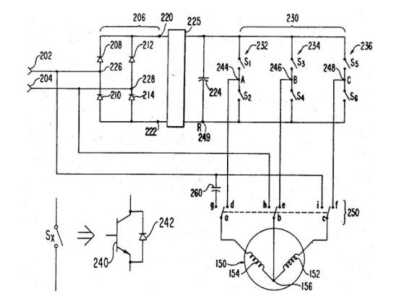
Рис. 3. Схема ПЧ с трехстоечным инвертором для ДАД
При питании от инвертора начала двух обмоток подключаются к первой и третьей стойкам а и с с двумя IGBTтранзисторами и обратными диодами, а их концы замыкаются между собой и подключаются ко второй стойке b. САУ разомкнутая, с синусоидальной ШИМ с опорным треугольным сигналом. Управляющие сигналы на стойках а и с комплементарны, средняя стойка управляется через отдельный регулятор. При этом задатчик направления вращения может быть сделан в двух разных вариантах: до и после регулятора тока. Также представлена схема САУ для двухстоечного инвертора, при которой общая точка обмоток подключается к средней точке звена постоянного тока, образованной двумя конденсаторами. Определено направление дальнейшего развития двухфазных приводов в качестве замены однофазных нерегулируемых двигателей, применяемых в вентиляторах, насосных станциях, бытовых электроприборах, а также регулируемых ДАД в электрическом транспорте, что открыло им путь в этой новой области в качестве замены тяговых ДПТ.
Преимущество предлагаемых САУ ДАД заключается в том, что углы коммутации выходных напряжений ШИМ фиксируются во всем диапазоне частот. Однако в этом случае крутящий момент ДАД содержит компонент двухчастотного импульсного крутящего момента, который вызывает вибрацию и шум в приводном узле.
В качестве альтернативы предлагаются традиционный трехстоечный инвертор с шестью силовыми транзисторами и четырехстоечный инвертор с восемью транзисторами (рис. 4), управляемые с помощью пространственно-векторной ШИМ.
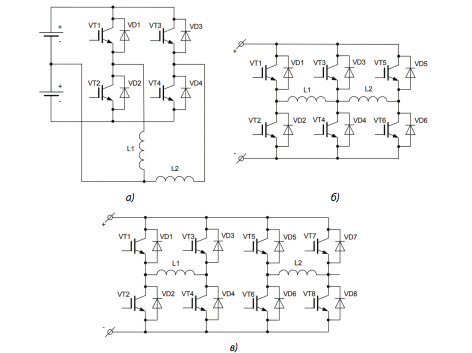
Рис. 4. Варианты конструкции инвертора для ДАД: а) двухстоечный; б) трехстоечный; в) четырехстоечный
Продолжение этих идей нашло отражение в патентах компании Danfoss, конструкция электропривода в которых осталась практически неизменной, но общая стойка инвертора подключалась через шунтируемый фазосмещающий конденсатор, поддерживающий угол смещения между фазами 90 град. во время разгона. Доказано, что значения амплитуды токов двух фаз не всегда должны быть равны, но при увеличении угла сдвига между напряжениями амплитуда одной из обмоток будет снижаться, при этом закон этого изменения будет зависеть от отношения между амплитудами. Такое изменение амплитуд фазных токов призвано устранить проблему поддержания постоянного межфазного угла. Закон управления при этом определяется блок-схемой, которая разбивает один период двухфазных токов на 4 участка в зависимости от значений токов, в каждом из которых синусоиды токов определяются по своим законам. Одновременно исследования регулирования ДАД с помощью векторной ШИМ проводились для трехстоечной конструкции инвертора. Основная цель данных работ заключалась в разработке алгоритма ШИМ с минимизацией потерь, возникающих от излишних коммутаций ключей инвертора. Исследовано четыре варианта пространственно-векторной ШИМ: обычная, минимальная, максимальная и гибридная, которой отдается предпочтение. Гибридная модуляция достигается при разделении шестигранника векторов напряжения на две половины, в одной из которых действует минимальная прерывистая, а в другой — максимальная прерывистая ШИМ (рис. 5).
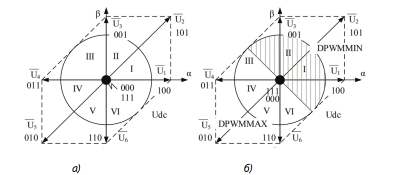
Рис. 5. Векторы ПВ ШИМ ДАД: а) стандартная ШИМ; б) гибридная ШИМ
При таком алгоритме управления уменьшается количество циклов переключения, а нагрузка более равномерно распределяется по стойкам инвертора. Стоит отметить, что через общую стойку протекает ток большей амплитуды, что может привести к большим потерям, но этот эффект устраняется при использовании гибридной прерывистой модуляции. Теоретические расчеты подтверждены экспериментом, результаты которого позволяют судить об улучшении кругового поля двигателя, улучшении синусоидальности токов и уменьшении числа коммутаций ключей общей стойки инвертора.
В России учеными АлтГТУ предложены новые схемы ПЧ однофазных двигателей, которые трактуются как системы с двухфазными двигателями. Отличием российских разработок является подключение ДАД к однофазной сети через непосредственный преобразователь частоты (НПЧ). При этом ключами НПЧ могут являться не только транзисторы, но и симисторы, и тиристоры. Иным является и предложенный алгоритм управления, основанный на разбиении периодов синусоиды питающей сети на несколько участков, на каждом из которых алгоритм управления основывается на требуемом направлении протекания токов по обмоткам двигателя.
Конструкция и алгоритм управления НПЧ с тиристорными ключами для ДАД существенно переработаны в исследованиях, касающихся модернизации электроприводов экскаваторов и замены ДПТ на частотно-регулируемые асинхронные двигатели. Кроме того, разработаны конструкции и методы управления матричных преобразователей частоты для ДАД для последующего применения в электротранспорте. При этом они считали наиболее целесообразным четырехпроводное подключение ДАД к преобразователю, так как при этом каждая фаза может управляться отдельно и довольно просто регулироваться математическим аппаратом устройства, без увеличения нагрузки на общий провод двух фаз.
Такое условие потребовало создания гальванической развязки между звеном постоянного тока и двухфазным выходом преобразователя посредством высокочастотного трансформатора. По сравнению со схемой трехстоечного инвертора (рис. 4 б) удалось обеспечить раздельное управление каждой фазой, что упрощало алгоритм коммутации, а также гальванически разделяло вход и выход всей системы. Однако для такого преобразователя обязательно требуется высокочастотный трансформатор с отпайками центральных точек каждой обмотки, что увеличивает стоимость, значительно усложняет схему и снижает ее надежность. Устранить этот недостаток предлагалось либо с помощью отпаек от обмоток двигателя, либо с помощью применения двух однофазных полно-мостовых матричных преобразователей, что приводило к увеличению числа полупроводниковых ключей.
В этом плане проведены исследования режимов векторной ШИМ ДАД традиционных ПЧ со звеном постоянного тока. В течение текущего десятилетия о регулируемых двухфазных приводах заговорили независимо друг от друга ученые в разных частях света, при этом трехстоечный вариант инвертора и способ управления по векторной ШИМ стали практически базовым вариантом преобразователя для ДАД, но были и исключения, касающиеся двух- и четырехстоечного исполнения. В САУ двухфазных ПЧ внедряли блоки дополнительных условий, разработанные для трехфазных приводов, с целью снижения или устранения различных негативных эффектов, включая применение прямого управления моментом (ПУМ).
Алгоритмы ПУМ ДАД были рассчитаны и экспериментально проверены для двух-, трех-, и четырехстоечных инверторов, а также матричных ПЧ. Стоит также обратить внимание на то, что ротор двухфазного двигателя может быть как короткозамкнутым (наиболее распространенный случай), так и на базе постоянных магнитов. Еще 2009 г. разработана оригинальная САУ двухфазным приводом на основе релейных регуляторов тока для двухстоечного инвертора. Экспериментально зафиксировано снижение бросков амплитуды пусковых токов и пульсаций момента при таком способе управления. Кроме того, разработан первый алгоритм управления трехстоечным инвертором двухфазного привода на основе двух релейных регуляторов тока.
Для сравнения нового алгоритма с известными ранее вариантами векторной ШИМ построены их модели и проведен сравнительный анализ результатов моделирования. Упомянутые выше броски амплитуды пусковых токов, сопровождающиеся колебаниями электромагнитного момента, характерны для всех типов асинхронных двигателей, но, если способы борьбы с ними в трехфазных АД известны, то в однофазных и двухфазных приводах они требуют существенной доработки.
Авторами статьи предложен новый способ снижения влияния этих явлений, основанный на задержке включения вспомогательной обмотки в зависимости от мгновенного значения напряжения на основной гармонике, который в сравнении с ранее разработанной САУ трехстоечным инвертором показал свою эффективность. Необходимо отметить, что если в начале ДАД рассматривался лишь как регулируемая замена однофазным АД в их традиционных применениях: насосы, вентиляторы, бытовые электроприборы, то в дальнейшем привод с ДАД стал рассматриваться как часть тягового механизма в перспективном электротранспорте. Вместе с тем данная тема остается малоисследованной, во многом из-за скепсиса значительной части научного сообщества, которая воспринимает двухфазный двигатель как временного предшественника трехфазного, а не полноценное развитие однофазного двигателя. Российской науке следует обратить внимание на изучение данного типа электропривода, чтобы в будущем не остаться без собственных инновационных электроустановок и устройств, созданных на базе регулируемых ДАД.
На основе измерений, сделанных системой Satec для двигателя под нагрузкой, можно построить рабочие характеристики двигателя: зависимости коэффициента мощности, токов статора, коэффициента гармонических искажений (THD) от активной мощности, которые показаны на рис. 6.
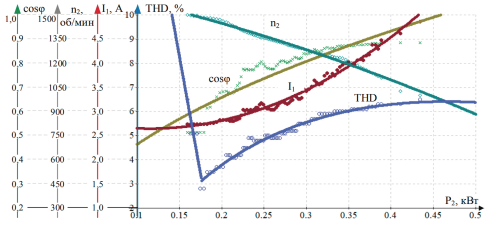
Рис. 6. Рабочие характеристики двигателя
Внешний вид рабочих характеристик схож с идеализированной формой рабочих характеристик двигателей переменного тока, указанной в различных справочных источниках, что может свидетельствовать о корректной работе системы Satec и правильно поставленном эксперименте. После получения исходных характеристик однофазного двигателя при прямом пуске можно перейти к экспериментам с работой двухфазного двигателя от преобразователя частоты с различными алгоритмами управления.
ВЫВОДЫ
1. Важным отличием двухфазных двигателей по отношению к наиболее распространенным трехфазным двигателям является то, что, поскольку при тех же геометрических размерах, что и у трехфазного двигателя, на каждую фазу двухфазного двигателя будет приходиться в полтора раза больше полюсов. То есть при сохранении мощности скорость вращения поля у двухфазного асинхронного двигателя будет меньше, а пусковой момент больше, чем у аналогичного трехфазного двигателя.
2. Существует несколько типов преобразователей частоты для электропривода на базе двухфазного асинхронного двигателя. Для ПЧ со звеном постоянного тока существуют три конструкции инвертора напряжения: двух-, трех- и четырехстоечный. Наиболее предпочтительным считается трехстоечный инвертор, поскольку конструктивно он ничем не отличается от распространенных инверторов трехфазного двигателя и совмещает в себе достоинства двух- и четырехстоечных вариантов.
3. При наличии системы векторного управления регулируемым электроприводом на базе двухфазного асинхронного двигателя обеспечивается выполнение современных требований, предъявляемых к электроприводам насосных станций, бытовым электроприборам.
4. Необходимо продолжение работ по совершенствованию алгоритмов коммутации трехстоечного инвертора для электропривода с двухфазным двигателем с целью снижения числа коммутаций и улучшения гармонического состава токов статора.